
در مقاله قبلي در خصوص مزاياي ديزل ژنراتور هاي سرعت متغير نسبت به ديزل ژنراتور هاي سرعت ثابت ، از جمله در خصوص كاهش مصرف سوخت صحبت شد. در اين مقاله ميخواهيم يكي از روش هايي كه با آن امكان اعمال كنترل سرعت متغير فراهم ميشود و مزايا و چگونگي آن را بررسي كنيم :
چکیده
در این مقاله، یک طرح کنترل سرعت غیر خطی مبتنی بر کنترل حالت لغزشی (SMC) در حالت عملكرد سرعت متغیر براي مجموعه چند دستگاه دیزل ژنراتور (EG) ارائه شدهاست. در ابتدا، مدل ریاضی نشاندهنده رابطه بین دور موتور، جریان گاورنر و گشتاور مکانیکی استخراج میشود. سپس کنترلکننده سرعت مبتنی بر SMC برای EG طراحی میشود. روش پیشنهادی میتواند عملکرد ردیابی مرجع سریع را با یک خطای حالت پایدار صفر فراهم کند. با توجه به عملکرد سرعت متغیر، مصرف سوخت در مقایسه با عملکرد سرعت ثابت ۱۱ % کاهش مییابد. اعتبار روش کنترل پیشنهادی با نتایج شبیهسازی تایید شدهاست.
واژگانکلیدی: کنترل حالت لغزشی، کنترل سرعت متغیر، ديزل ژنراتور ، بازده سوخت
1. مقدمه
مجموعه دستگاه هاي ديزل ژنراتور معمولا برای منابع اصلی یا اضطراری انرژی در جزایر، مراکز داده ها ، بیمارستانها و غیره استفاده میشود. به طور مرسوم، موتوردیزل EG با سرعت ثابت کار میکند. با این حال، اخیرا با سرعت متغیر به منظور افزایش بازده موتور نيز مورد استفاده قرار ميگيرند . براساس مرجع شماره [ ۱ ]، هزینه صرفهجویی در مصرف سوخت برای سیستم ۲۲ کیلوواتی ده هزار دلار در سال است . برای کاهش مصرف سوخت در سيستم هاي (EG) ، عملیات سرعت متغیر مورد نیاز است.
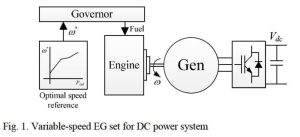
در این حالت عملکرد، دامنه و فرکانس ولتاژهای خروجی ديزل ژنراتور با تغییر دور موتور تغییر میکند. به طور کلی، ولتاژ خروجی AC ژنراتور از طریق یکسوسازهای دیودی، یکسوسازهای کنترلشده SCR یا مبدلهای PWM AC / DC به ولتاژ DC تبدیل میشود. اگر از مبدلهای AC / DC PWM استفاده شود، ولتاژ خروجی ژنراتورها در يك مقدار ثابت DC کنترل میشود که در شکل شماره 1 نشانداده شدهاست که در آن سیستم از موتور دیزل، ژنراتور سنکرون مغناطیس دائم و مبدل AC / DC PWM تشکیل شده است.
به دلیل ویژگی هاي غیر خطی موتور ديزل، عملكرد سیستم EG در حالت سرعت متغیر دشواري هاي خاص خود را درا ميباشد . معادله موتور دیزل اساسا غیر خطی است که ناشی از تاخیر زمانی ناشی از تزریق سوخت و سیستم انفجار و اصطکاک است. بنابراین، کنترلکننده سرعت سیستم EG باید به گونه اي طراحي شود تا مقاومت لازم را در برابر اختلال و ویژگیهای غیر خطی داشته باشد.
در وهله اول، برای عملكرد سرعت متغیر EG، کنترلکننده خطی PID به دلیل پیادهسازی آسان آن به طور گستردهای مورد استفاده قرار گرفتهاست. با این حال، انتخاب ضرايب كنترل كننده PID دشوار است، زیرا نقطه كار EG قابلتغییر است. علاوه بر این، کنترلکننده PID نسبت به اختلالات مقاوم نیست . در نتيجه ، SMC به کنترل سرعت سیستم پیشرانش موتور دیزل اعمال شدهاست، زیرا SMC در مدلسازی خطا و اختلالات مقاوم میباشد [ ۲ ].
برای دستیابی به حداقل مصرف سوخت، مرجع سرعت باید با توجه به بار تنظیم شود. در این روش، نوسانات ممکن است در زماني که به كنترل سطح لغزشی تغيير پيدا مي كند میشود ظاهر شود. برای حل این مشکل، یک سطح لغزشی با برای رسیدن به ردیابی مرجع سریع و جلوگیری از نوسانات بزرگ طراحی شدهاست.
برای طراحی کنترلکننده سرعت موتور، مدل موتور ديزل مورد نیاز است مدل موتور میتواند به عنوان یک المان تاخیر زمانی [ ۳ ]، [ ۴ ] تقریب زده شود، که در آن از مشخصه غیر خطی موتور دیزل صرفنظر میشود. با این حال، در حقیقت، مدل موتور با روش پیشنهاد شده توسط هندریکس به طور کلی مورد استفاده قرار میگیرد [ ۵ ]. این مدل شامل ترمودینامیک است که کنترل آن را دشوار میسازد. یک مدل موتور دیزل دیگر براساس دادههای اندازهگیری در [ ۶ ] ارائه شدهاست، که در آن گشتاور موتور به عنوان تابعی از سرعت موتور و جریان گاورنر بیان میشود. معادله گشتاور در این مدل شامل تنها دور موتور و جریان گاورنر بدون در نظر گرفتن ترمودینامیک است.
در این مقاله، یک طرح کنترل سرعت متغیر براساس کنترل حالت لغزشی (SMC)برای EG پیشنهاد شدهاست. ابتدا، مدل چند جملهای مرتبه ۴ براساس دادههای اندازهگیری DG بدستآمده است. سپس منحنی سرعت بهینه برای کار در حداقل نقاط مصرف سوخت بدست میآید. سپس، یک کنترلکننده SMC برای تنظیم سرعت EG طراحی شدهاست. در نهایت، اعتبار کنترلکننده پیشنهادی با نتایج شبیهسازی تایید میشود.
2. نتایج شبیهسازی
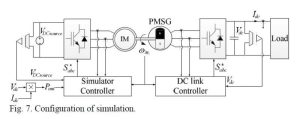
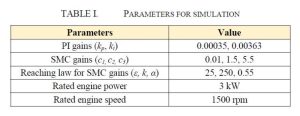
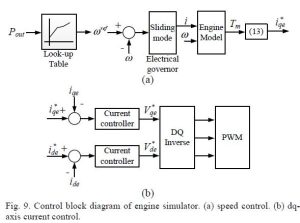
برای تایید اعتبار روش پیشنهادی، شبیهساز موتور با مجموعه MG استفاده میشود. پیکربندی مدل شبیهسازی در شکل 7 نشانداده شدهاست. پارامترهای مورد استفاده در شبیهسازی در جدول ۱ فهرست شدهاند. شکل ۸ نمودار بلوک کنترل AC / DC PWM را نشان میدهد که در آن کنترلکننده های جریان محور dq داخلی و کنترلگر ولتاژ DC bus خارجی در یک ساختار آبشاری به کار گرفته شدهاند.
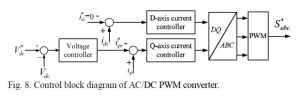
اولی از کنترلکننده PI و دومی از کنترلکننده IP استفاده میکند.
شکل ۹ دیاگرام بلوک کنترل موتور القایی (IM)را برای ارزيابي مشخصات موتور دیزل نشان میدهد. مرجع سرعت بهینه از جدول جستجو تعیین میشود، که برای آن اطلاعات توان بار مورد نیاز است. سپس، از مدل موتور دیزل، مرجع گشتاور موتور القایی تولید میشود، که مرجع جریان محور q به صورت زیر محاسبه میشود:
که در آن *Tm مرجع گشتاور، P تعداد قطبها، Lm اندوکتانس مغناطیسی، Lr اندوکتانس روتور و idse جریان محور d هستند.
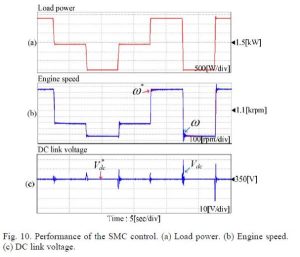
شکل ۱۰ عملکرد SMC را برای تغییر بار نشان میدهد که در شکل ۱۰ (a)نشانداده شدهاست. شکل ۱۰ (b)عملکرد کنترل سرعت را نشان میدهد. دیده میشود که سرعت واقعی به خوبی مرجع خود را در ۰.۵ ثانیه دنبال میکند. شکل ۱۰ (c)ولتاژ لینک DC را نشان میدهد که به خوبی کنترل میشود. حداکثر انحراف در ولتاژ لینک DC برابر با ۲۰ ولت است .
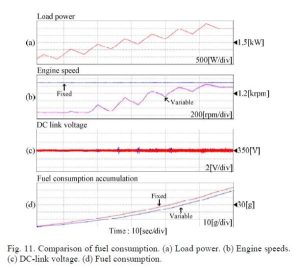
شکل ۱۱ نتایج شبیهسازی را برای مقایسه مصرف سوخت بین طرحهای عملیاتی سرعت ثابت و متغیر با SMC نشان میدهد. شکل ۱۱ (a)تغییرات توان بار اعمالی را نشان میدهد. شکل ۱۱ (b)دور موتور را در دو حالت نشان میدهد. شکل ۱۱ (c)عملکرد کنترل ولتاژ لینک DC را نشان میدهد، که در آن دیده میشود که ولتاژ لینک DC از مرجع خود به خوبی پیروی میکند. شکل ۱۱ (d)مقدار مصرف سوخت را نشان میدهد. زمانی که موتور ديزل به مدت یک دقیقه کار میکند، مصرف سوخت در عملیات سرعت ثابت ۵۴ گرم است. با این حال، برای عملیات سرعت متغیر، ۴۸ گرم است. بنابراین، مصرف سوخت ۱۱ % کاهش مییابد.
شکل ۱۲ مقایسه عملکرد کنترل سرعت موتور با کنترلکننده های SMC و PI را نشان میدهد. مشاهده میشود که عملکرد کنترلکننده PI مشابه با عملکرد SMC است زیرا دستاوردهای PI به طور مناسبی در نقطه عملیاتی دادهشده تنظیم شدهاند.
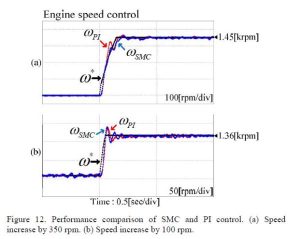
با این حال، عملکرد کنترلکننده PI با همان دستاوردهای قبلی در سایر نقاط اجرایی تضعیف شدهاست، که در شکل ۱۳ نشانداده شدهاست، که در آن توان بار از بدون بار به ۱.۴ کیلووات و بدون شرایط بار تغییر میکند. بدیهی است که SMC عملکرد بهتری نسبت به کنترل PI میدهد.

نتیجهگیری
در این مقاله، یک کنترل سرعت متغیر سیستمهای مهندسی دیزل مبتنی بر کنترل حالت لغزشی پیشنهاد شدهاست. در ابتدا، مدل موتور ديزل در معادله چند جملهای مرتبه چهارم به دست آمدهاست. سپس کنترلکننده سرعت SMC طراحی شدهاست که در آن یک قانون دستیابی اعمال میشود.
با کنترلکننده SMC، عملکرد کنترل سرعت موتور بدون توجه به محدوده عملکرد بهبود یافتهاست. با توجه به عملکرد بهینه سرعت موتور، بازده سوخت در مقایسه با عملکرد سرعت ثابت افزایش مییابد. در شبیهسازی، ۱۱ % صرفهجویی در مصرف سوخت حاصل شدهاست. روش پیشنهادی با نتایج شبیهسازی تایید شدهاست.
منابع :
Variable Speed Control of Diesel Engine Generator using Sliding Mode Control
تامین تجهیز مولد
شرکت تامین تجهیز مولد تولید کننده دیزل ژنراتور با بیش از 10 سال سابقه در واردات و عرضه انواع دیزل ژنراتور ,
تامین و تجهیز نیروگاه های دیزلی و گازی , فروش و پشتیبانی در تامین و احداث نیروگاه های تولید پراکنده (DG) بر
پایه مولد های گازسوز آماده ارائه بهترین خدمات به مشتریان گرامی میباشد. این شرکت به عنوان نمایندگی رسمی
و انحصاری فروش و خدمات پس از فروش دیزل ژنراتور های كوپله فابريك در ایران فعالیت می کند.
{kind=link}
{kind=link}